- All Posts
- Arduino
- Concepts
- ESP-32
- Raspberry PI
- Robotics
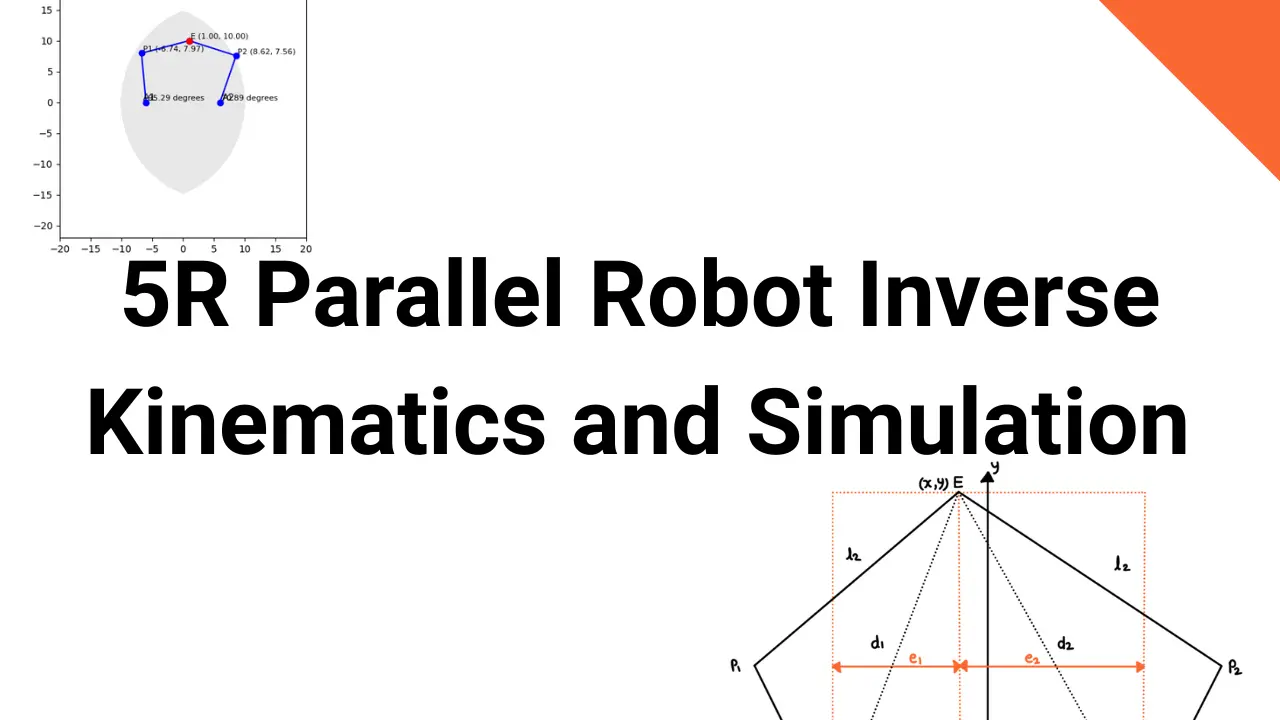
One of the simplest and elegant robot arm designs is the 5R linkage mechanism. The 5R robot arm is a type...
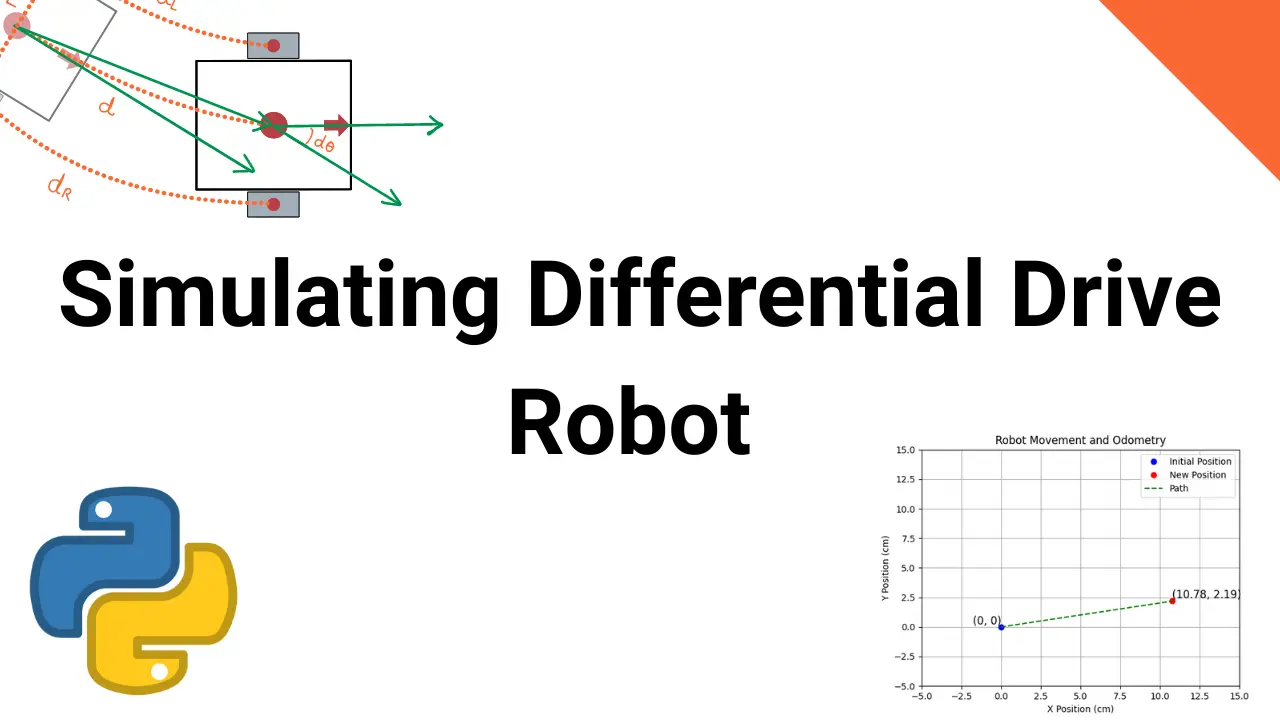
Implementing differential drive robot odometry simulation in python by using high school level math's.
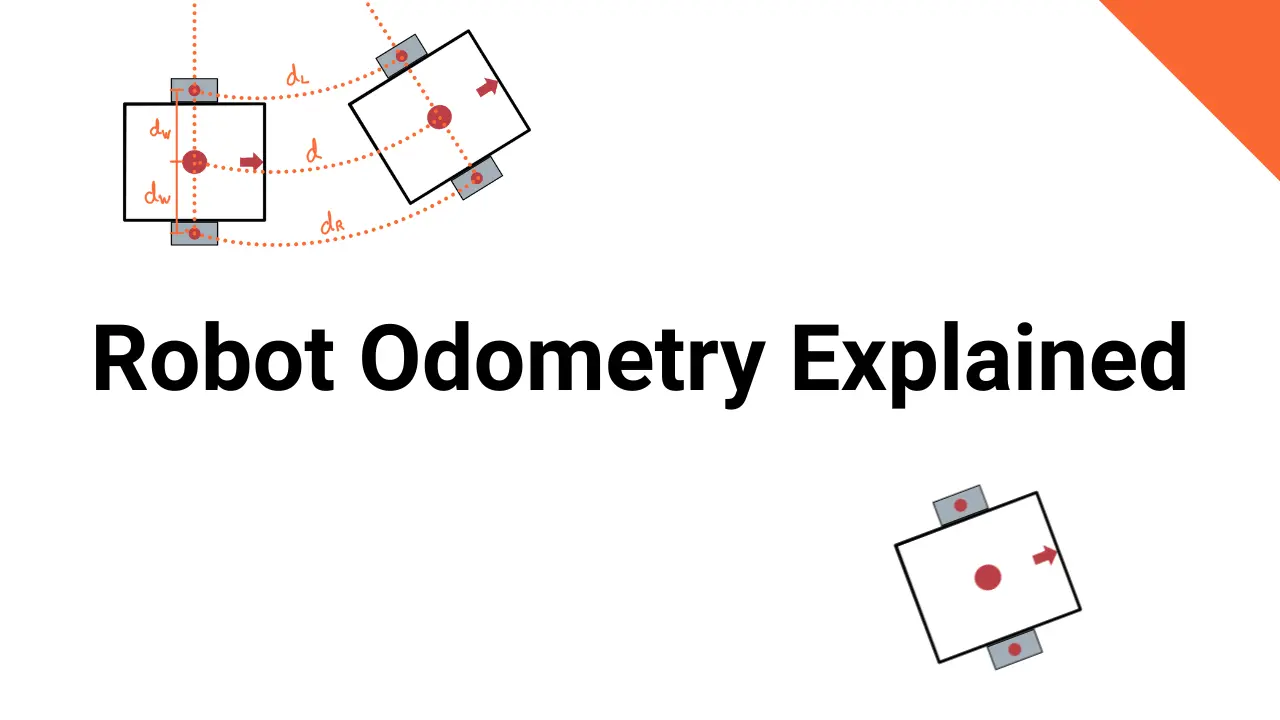
Odometry is essential for robot navigation, allowing them to estimate their position. These methods help engineers select the best approach...
Forward Kinematics Forward kinematics refers to the process of calculating the position and orientation of the end-effector (e.g., a robot’s...
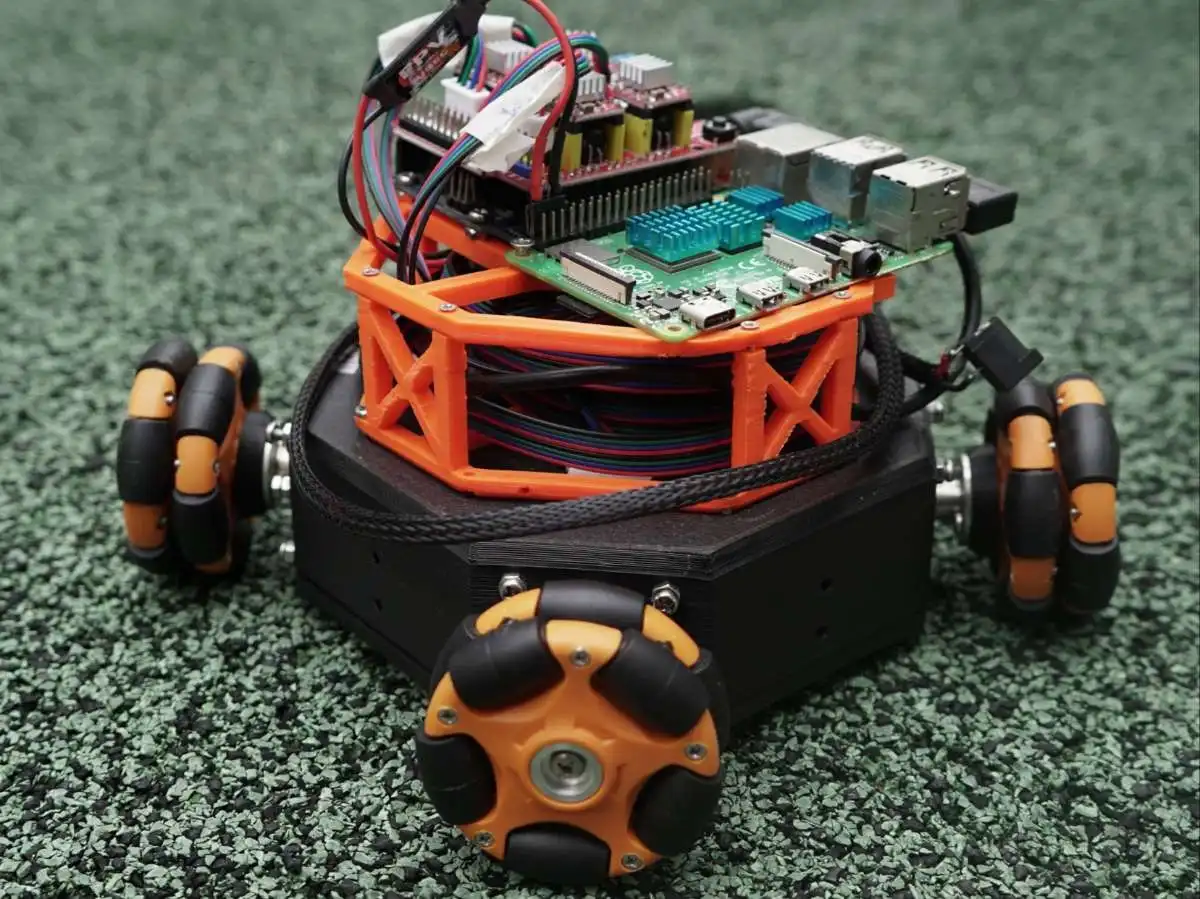
S.L.I.D.E (Seamless locomotion in diverse environments) is an Omni wheel platform that aims to explore various applications of holonomic robots....

Let’s talk about Mecanum wheels. They are awesome and full of magic and I think everyone should try them once...

This is an open-source project that aims to inspire young students in the field of space and technology by simulating a small-scale moon...
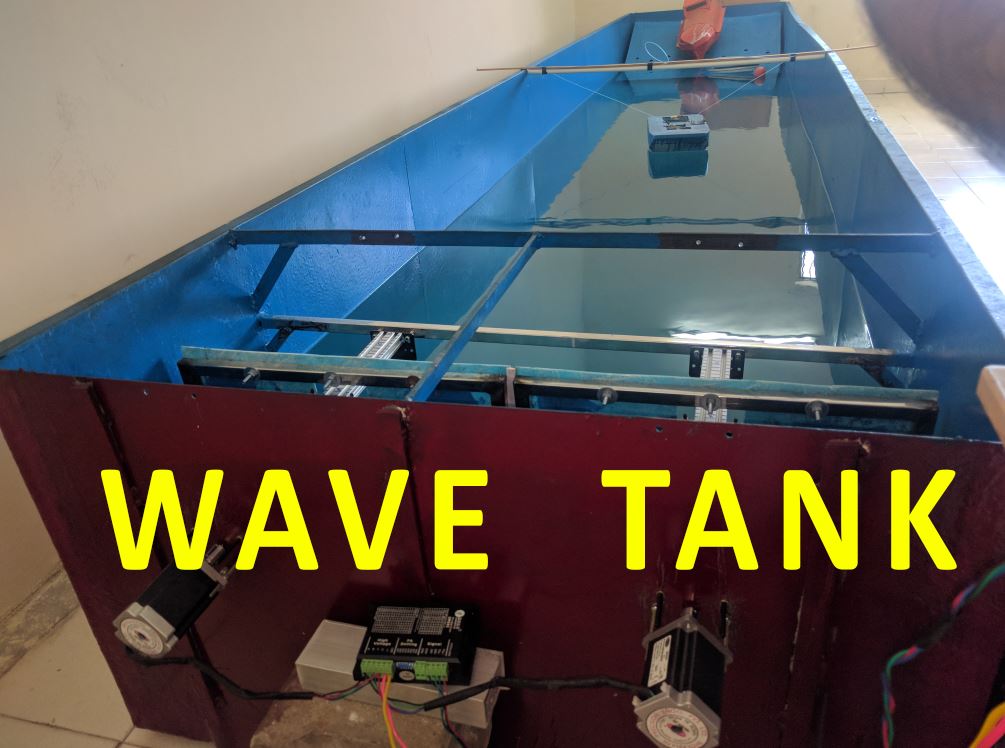
A wave tank is a laboratory setup for observing the behavior of surface waves. The typical wave tank is a...

In this project, we are going to make an RC controlled pontoon with the help of pvc pipe. Why PVC...