What is a Holonomic Robot
A holonomic robot has complete and independent control over all its movement directions. Holonomic robots can move in any direction forward, backward, or sideways and spin in place, all at the same time.
A holonomic robot has complete and independent control over all its movement directions. Holonomic robots can move in any direction forward, backward, or sideways and spin in place, all at the same time.
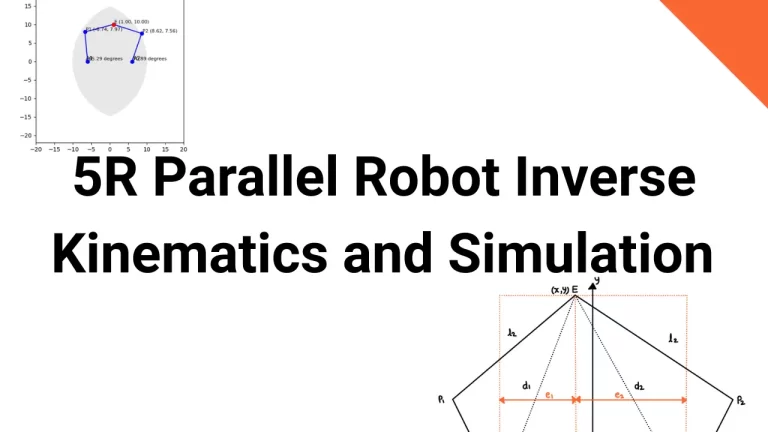
One of the simplest and elegant robot arm designs is the 5R linkage mechanism. The 5R robot arm is a type…
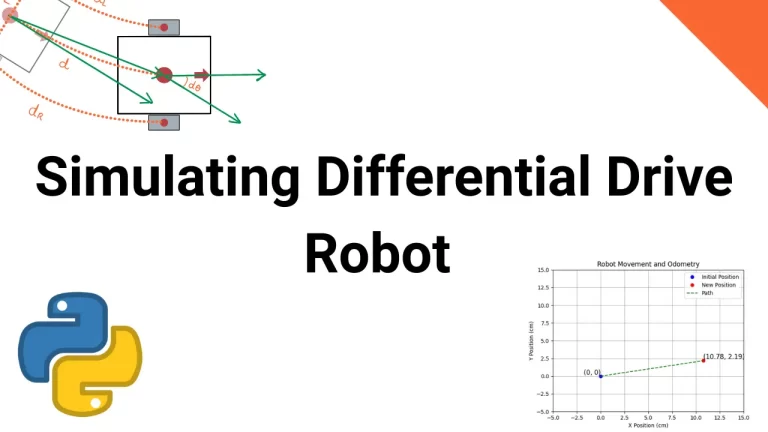
Implementing differential drive robot odometry simulation in python by using high school level math's.
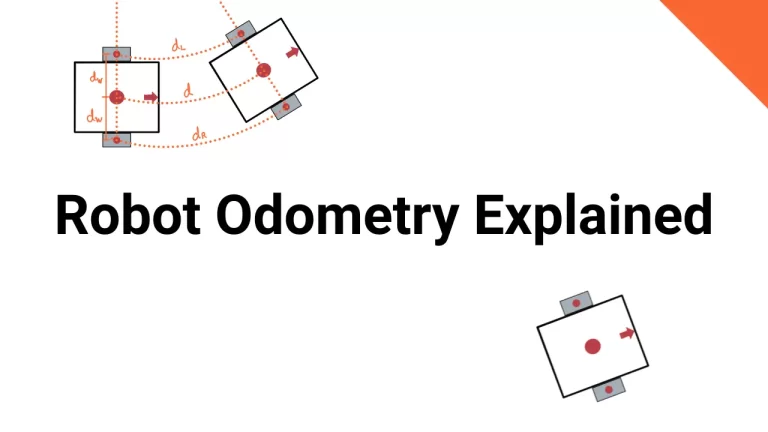
Odometry is essential for robot navigation, allowing them to estimate their position. These methods help engineers select the best approach for robot movement in diverse conditions.

Forward Kinematics Forward kinematics refers to the process of calculating the position and orientation of the end-effector (e.g., a robot’s…