What is a Holonomic Robot
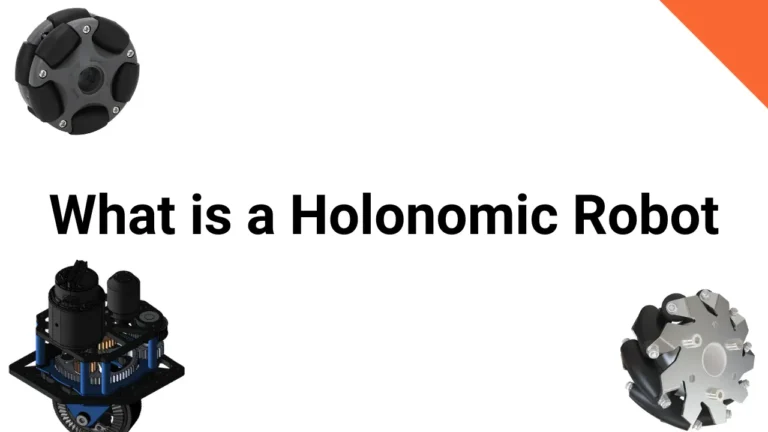
A holonomic robot has complete and independent control over all its movement directions. Holonomic robots can move in any direction forward, backward, or sideways and spin in place, all at the same time.
A holonomic robot has complete and independent control over all its movement directions. Holonomic robots can move in any direction forward, backward, or sideways and spin in place, all at the same time.
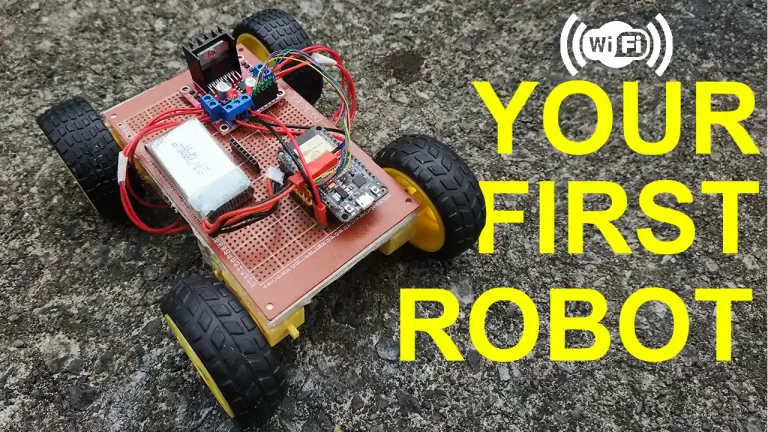
FREEBOT is an open-source ESP32 robot that aims to make robotics easy and affordable. It costs just 1000 Rs. and is made using cardboard, ESP32 and L298N motor driver. This is a great project for beginners who want to learn robotics and IoT.
Add ESP32 board on Arduino IDE. This is the new method older board links do not work.

CAKE is an ESP32-based robot capable of path tracking, mapping and waypoint navigation. It has encoders and an IMU sensor, which helps the robot calculate its position using odometry. The robot also has a Tof sensor, which, when combined with the IMU, can make a map of the local area.
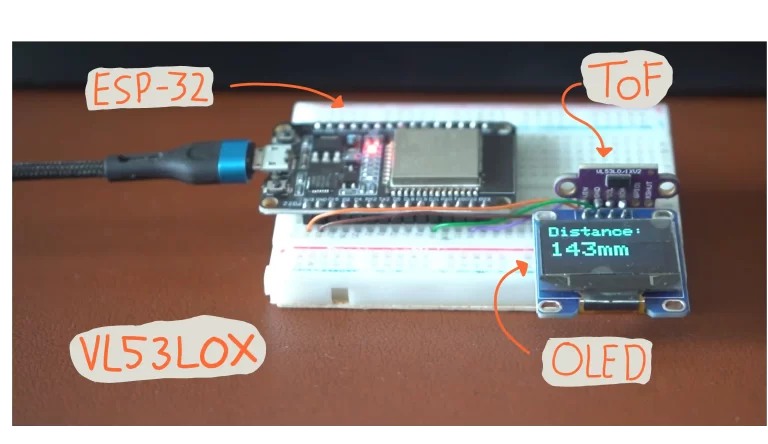
The VL53L0X is a ToF sensor that measures the distance to an object using a invisible IR laser. Unlike regular sensors it uses Time-of-Flight (ToF). In this article, we will cover the technical details of VL53L0X and also make a small project using ESP32.
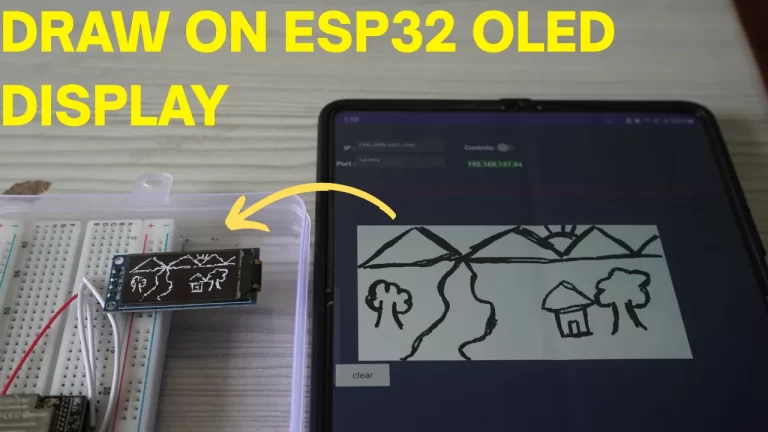
Live drawing on OLED screen attached to ESP32 like an IPAD. It is very annoying making the UI for OLED, so I made a small ESP32 program and an Android app that will allow me to draw the UI on the OLED screen. These are your normal OLEDs used with Arduino and ESP32.
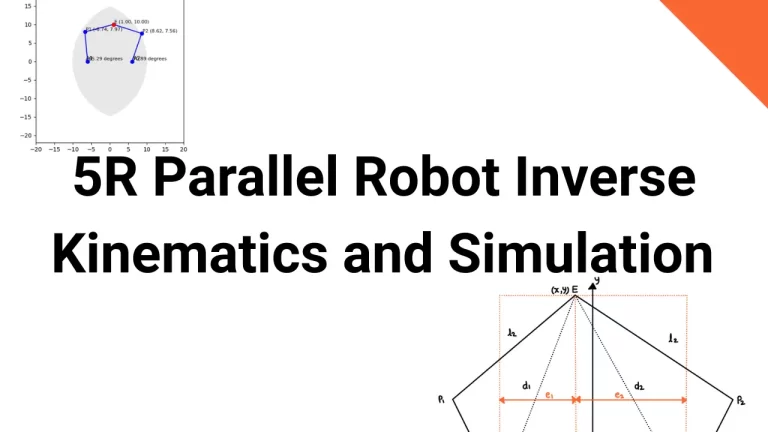
One of the simplest and elegant robot arm designs is the 5R linkage mechanism. The 5R robot arm is a type of parallel manipulator, which sets it apart from the more common serial robots. A serial robot is like your own arm, one…
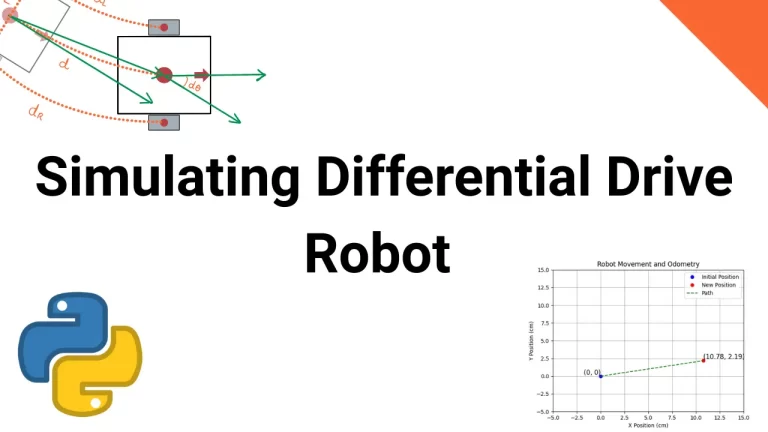
Implementing differential drive robot odometry simulation in python by using high school level math's.
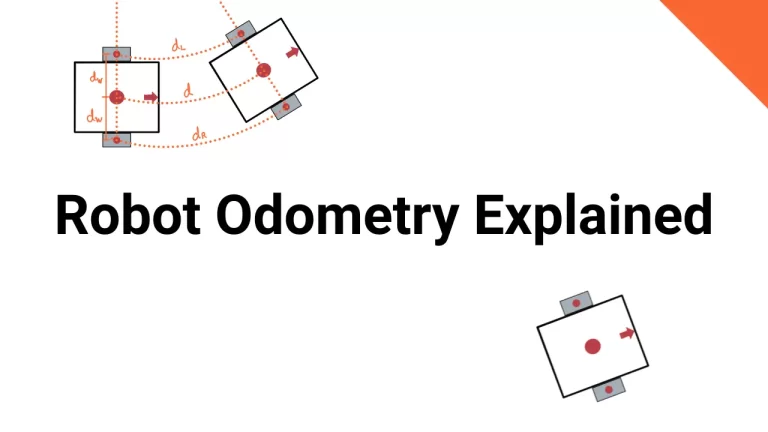
Odometry is essential for robot navigation, allowing them to estimate their position. These methods help engineers select the best approach for robot movement in diverse conditions.

Forward Kinematics Forward kinematics refers to the process of calculating the position and orientation of the end-effector (e.g., a robot’s hand or tool) based on the known joint parameters (angles, distances, etc.) of a robotic arm. In forward kinematics, you…